

A causa di l'aumentu di i costi di u travagliu è di a velocità di l'iterazione di l'aghjurnamentu di u produttu3In l'industria elettronica C, tutte l'imprese cercanu a megliu suluzione.
A causa di l'aumentu di i costi di u travagliu è di a velocità di iterazione di l'aghjurnamentu di i prudutti in l'industria elettronica 3C, tutte l'imprese cercanu a megliu suluzione.
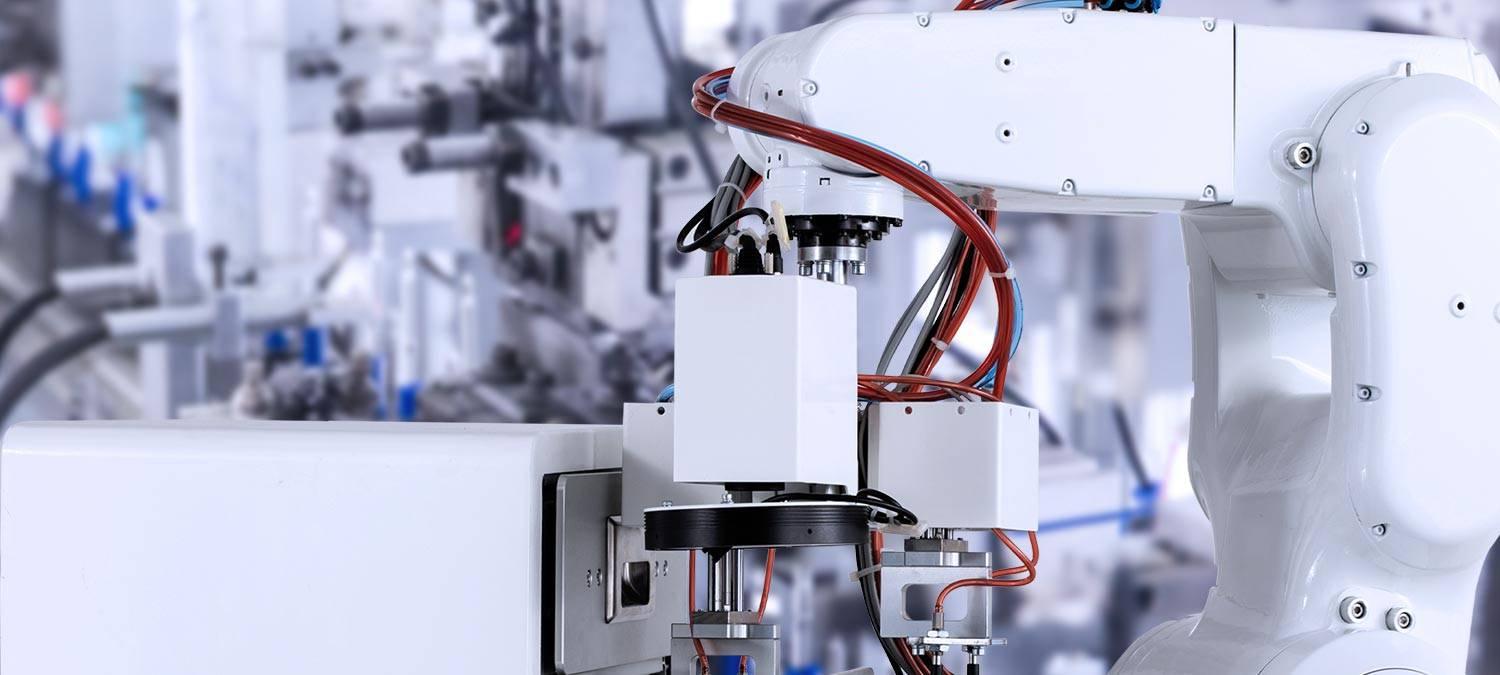
Introduzione di u prugettu Vantaghji industriali di i robot collaborativi
Velocità più alta
Pianificazione di traiettorie in linea basata annantu à a dinamica, cù una velocità massima di sintesi chì righjunghje 7 m/s
Modellazione dinamica d'alta precisione è identificazione di parametri, tecnulugia di feedforward di velocità è inerzia, chì dà pienu ghjocu à e prestazioni limite di l'hardware
Più precisu
Compensazione di l'errore glubale d'alta precisione, precisione di pusizionamentu ripetutu finu à ± 0,015 mm
U percorsu precisu è lisciu hè più adattatu per scenarii operativi precisi cum'è a sparghjera di colla.
Più affidabile
Assicurà un funziunamentu affidabile à longu andà di i cumpunenti principali da u puntu di vista di a cuncepzione hardware è software.
U pruduttu hà passatu IP67, CE, CR è altre certificazioni, prova di funziunamentu 0 ° C ~ 45 ° C è 120 ore di prova di consegna.
Più risparmiu di spaziu
Robot collaborativu di piccula carica cù occupazione minima di spaziu
A forma di gomitu hè prevista per a linea di uscita di a coda à l'estremità di u corpu principale per riduce u spaziu occupatu da a linea di uscita.
U cavu è u mutore di u robot sò integrati, è l'utente pò cunnette si facilmente per mezu di l'interfaccia di u bracciu.
Più faciule d'utilizà
Supporta a funzione di cuntrollu remotu è l'interfaccia di sviluppu secundariu SDK
Supporta CC-Link, Modbus (TCP, RTU), PROFINET, Ethernet/IP, EtherCAT è altri protocolli di bus
Supporta u portu seriale, TCP/IP è altri modi di cumunicazione
Manutenzione simplice, serviziu puntuale, prufessiunale è efficiente






