Robot Cooperativu Flessibile di a Serie ER
Parametri tecnichi
| ER3 | ER7 | ER3 Pro | ER7 Pro | |||||
| Specificazione | ||||||||
| Caricà | 3 chilò | 7 chilò | 3 chilò | 7 chilò | ||||
| Raggiu di travagliu | 760 mm | 850 mm | 760 mm | 850 mm | ||||
| Pesu mortu | Circa 21 kg | Circa 27 kg | Circa 22 kg | Circa 29 kg | ||||
| Gradu di Libertà | 6 articulazioni rotative | 6 articulazioni rotative | 7 giunti rotanti | 7 giunti rotanti | ||||
| MTBF | >35000 ore | >35000 ore | >35000 ore | >35000 ore | ||||
| Alimentazione elettrica | 48V CC | 48V CC | 48V CC | 48V CC | ||||
| Programmazione | Insegnamentu di trascinamentu è interfaccia grafica | Insegnamentu di trascinamentu è interfaccia grafica | Insegnamentu di trascinamentu è interfaccia grafica | Insegnamentu di trascinamentu è interfaccia grafica | ||||
| Prestazione | ||||||||
| PUTERE | Media | Valore di piccu | Media | Valore di piccu | Media | Valore di piccu | Media | Piccu |
| CONSUMU | 200w | 400w | 500w | 900w | 300w | 500w | 600w | 1000w |
| Sicurezza | > 22 Funzioni di Sicurezza Ajustabili | > 22 Funzioni di Sicurezza Ajustabili | > 22 Funzioni di Sicurezza Ajustabili | > 22 Funzioni di Sicurezza Ajustabili | ||||
| Certificazione | Cunfurmità cù a norma "EN ISO 13849-1, Cat. 3, PL d, Certificazione CE UE" | Cunfurmità cù a norma "EN ISO 13849-1, Cat. 3, PL d, Certificazione CE UE" | Cunfurmità cù a norma "EN ISO 13849-1, Cat. 3, PL d, Certificazione CE UE" | Cunfurmità cù a norma "EN ISO 13849-1, Cat. 3, PL d, Certificazione CE UE" | ||||
| Rilevazione di forza, flangia di l'utensile | forza, XyZ | Momentu di forza, XyZ | Forza, xyZ | Momentu di forza, XyZ | Forza, xyZ | Momentu di forza, XyZ | Forza, xyZ | Momentu di forza, xyz |
| Rapportu di risoluzione di a misurazione di a forza | 0,1N | 0,02 Nm | 0,1N | 0,02 Nm | 0,1N | 0,02 Nm | 0,1N | 0,02 Nm |
| Precisione relativa di u cuntrollu di a forza | 0,5N | 0,1 Nm | 0,5N | 0,1 Nm | 0,5N | 0,1 Nm | 0,5N | 0,1 Nm |
| Gamma regulabile di rigidità cartesiana | 0~3000N/m,0~300Nm/rad | 0~3000N/m,0~300Nm/rad | 0~3000N/m,0~300Nm/rad | 0~3000N/m,0~300Nm/rad | ||||
| Gamma di temperatura di funziunamentu | 0~40° ℃ | 0~40° ℃ | 0~40° ℃ | 0~40 ℃ | ||||
| Umidità | 20-80% RH (senza condensazione) | 20-80% RH (senza condensazione) | 20-80% RH (senza condensazione) | 20-80% RH (senza condensazione) | ||||
| 180°/s | ||||||||
| 180°/s | ±0,03 mm | ±0,03 mm | ±0,03 mm | ±0,03 mm | ||||
| 180°/s | Campu di travagliu | Velocità massima | Campu di travagliu | Velocità massima | Campu di travagliu | Velocità massima | Campu di travagliu | Velocità massima |
| 180°/s | ±170° | 180°/s | ±170° |
| ±170° | 180°/s | ±170° | 110°/s |
| Asse 2 | ±120° | 180°/s | ±120° |
| ±120° | 180°/s | ±120° | 110°/s |
| Asse 3 | ±120° | 180°/s | ±120° | 180°/s | ±170° | 180°/s | ±170° | 180°/s |
| Asse 4 | ±170° | 180°/s | ±170° | 180°/s | ±120° | 180°/s | ±120° | 180°/s |
| Asse 5 | ±120° | 180°/s | ±120° | 180°/s | ±170° | 180°/s | ±170° | 180°/s |
| Asse 6 | ±360° | 180°/s | ±360° | 180°/s | ±120° | 180°/s | ±120° | 180°/s |
| Asse 7 | ------ | ------ | ------ | ------ | ±360° | 180°/s | ±360° | 180°/s |
| Velocità massima à a fine di l'utensile | ≤3m/s | ≤2,5 m/s | ≤3m/s | ≤2,5 m/s | ||||
| Funziunalità | ||||||||
| Gradu di prutezzione IP | IP54 | IP54 | IP54 | IP54 | ||||
| Classe ISO di stanza bianca | 5 | 6 | 5 | 6 | ||||
| Rumore | ≤70dB(A) | ≤70dB(A) | ≤70dB(A) | ≤70dB(A) | ||||
| Muntatura di robot | Muntatu furmale, muntatu inversu, muntatu laterale | Muntatu furmale, muntatu inversu, muntatu laterale | Muntatu furmale, muntatu inversu, muntatu laterale | Muntatu furmale, muntatu inversu, muntatu laterale | ||||
| Porta I/O di scopu generale | Ingressu digitale 4 | Ingressu digitale 4 | Ingressu digitale 4 | Ingressu digitale 4 | ||||
|
| Output digitale4 | Output digitale 4 | Output digitale4 | Output digitale 4 | ||||
| Porta I/O di Sicurezza | Arrestu d'emergenza esternu 2 | Arrestu d'emergenza esternu 2 | Arrestu d'emergenza esternu 2 | Arrestu d'emergenza esternu 2 | ||||
|
| Porta di sicurezza esterna2 | Porta di sicurezza esterna 2 | Porta di sicurezza esterna 2 | Porta di sicurezza esterna 2 | ||||
| Tipu di cunnettore di strumentu | M8 | M8 | M8 | M8 | ||||
| Alimentazione I/O di u strumentu | 24V/1A | 24V/1A | 24V/1A | 24V/1A | ||||
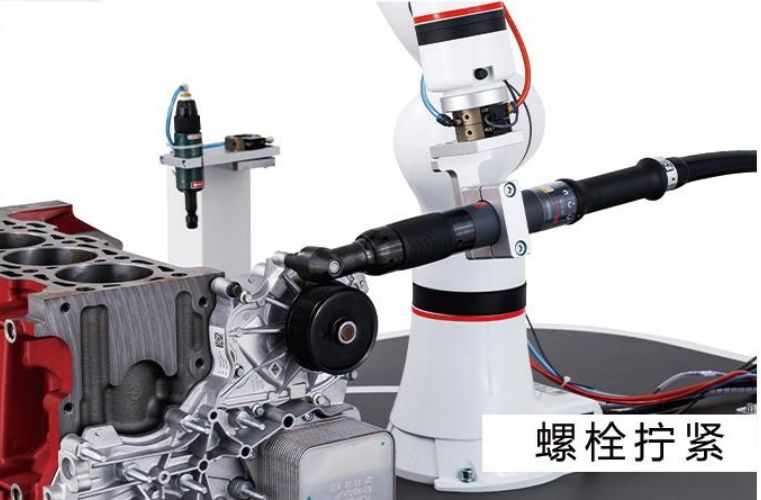
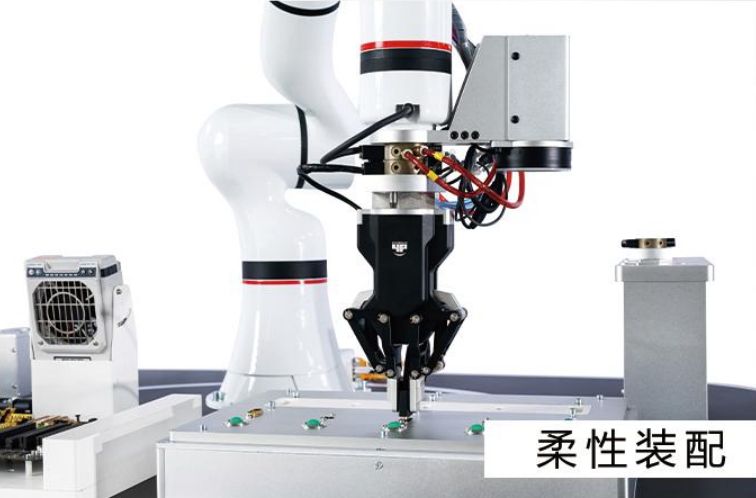
Applicazioni industriali
I robot collaborativi flessibili XMate sò adatti per una varietà di applicazioni di prucessu, cumprese l'assemblaggio flessibile, u bloccu di viti, l'ispezione è a misurazione, u trasportu, a rimozione di u rivestimentu di colla nantu à i materiali, a cura di l'attrezzatura, ecc. Pò aiutà l'imprese di tutte e dimensioni à migliurà a produttività è à ottene una automatizazione flessibile.